
登录注册
UG挖捞机器人(ID:1414358)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17166022404260.rar | 10.28M |
| 2 | 1555_step.prt | 7.63M |
| 3 | 323.8827.prt | 104.00K |
| 4 | 32A-17X23-2310.0_step.prt | 5.44M |
| 5 | 32A-17_step.prt | 452.50K |
| 6 | 32A-19X19-1346_step.prt | 3.10M |
| 7 | 32A-19_step.prt | 495.00K |
| 8 | 32A-23_step.prt | 584.00K |
| 9 | aj160x45x3x90x90_stp.prt | 181.00K |
| 10 | aj80x16x3x32x32_stp.prt | 206.00K |
| 11 | B140X50X3X130X130_step.prt | 214.50K |
| 12 | B180X65X3X130X130_step.prt | 320.50K |
| 13 | B6210DDU_stp.prt | 119.50K |
| 14 | DIANPING_step.prt | 326.00K |
| 15 | DQJR-D-1.prt | 1.25M |
| 16 | DQJR-D140-10IPW_step.prt | 471.00K |
| 17 | F-M27X200U_stp.prt | 154.50K |
| 18 | HDF30_stp.prt | 255.00K |
| 19 | HLB45_stp.prt | 197.50K |
| 20 | jiansujizhou.prt | 144.00K |
| 21 | JSI125x200CB_000____stp.prt | 95.00K |
| 22 | lb.prt | 217.00K |
| 23 | lcd.prt | 234.50K |
| 24 | luoshuan-M10x30_GB5783-86.prt | 138.00K |
| 25 | luoshuan-M12x50_GB5783-86.prt | 170.50K |
| 26 | luoshuan-M20x50_GB5783-2000.prt | 188.50K |
| 27 | NSP-10-7V0A2-14_step.prt | 1.92M |
| 28 | P-1.prt | 371.50K |
| 29 | pidaiA_stp.prt | 172.00K |
| 30 | QJ-1.prt | 209.50K |
| 31 | ROCOJ8-513513.prt | 568.00K |
| 32 | tuizhou.prt | 248.00K |
| 33 | UCFC214_step.prt | 264.50K |
| 34 | UCFC216_step.prt | 274.50K |
| 35 | UCP216_step.prt | 303.00K |
| 36 | _F-JSI125CB.prt | 197.50K |
| 37 | _HRO38-513.prt | 138.00K |
| 38 | _HROJS38-513_pin.prt | 124.50K |
| 39 | _JNPN12_p.prt | 105.00K |
| 40 | _JSI-125-M27x2-Nut.prt | 116.50K |
| 41 | _JSI-125CA_CB_CRScrew.prt | 99.50K |
| 42 | _JSI-125x200-CB0c.prt | 283.00K |
| 43 | _JSIJSIDJSIJPOLE125JSI2000.prt | 97.50K |
| 44 | _ROCOJ8-513_frame.prt | 228.50K |
| 45 | 一级水管.prt | 672.00K |
| 46 | 一级清洗机构.prt | 180.00K |
| 47 | 二级水管.prt | 648.00K |
| 48 | 从动轴.prt | 168.50K |
| 49 | 侧支撑.prt | 928.00K |
| 50 | 分土犁.prt | 1.12M |
| 51 | 发动机.prt | 414.00K |
| 52 | 发动机减速器.prt | 180.50K |
| 53 | 履带车.prt | 1.85M |
| 54 | 带C.prt | 261.50K |
| 55 | 引导板.prt | 369.00K |
| 56 | 挖捞.prt | 322.00K |
| 57 | 挖捞机器人.prt | 333.00K |
| 58 | 挖掘机构.prt | 225.50K |
| 59 | 挖掘篮导向轴.prt | 331.00K |
| 60 | 挖掘网篮.prt | 11.14M |
| 61 | 油缸.prt | 83.00K |
| 62 | 清洗机构.prt | 112.50K |
| 63 | 网带.prt | 162.00K |
| 64 | 网带从动轴.prt | 167.50K |
| 65 | 网带驱动轴.prt | 177.50K |
| 66 | 装配总图.prt | 165.50K |
| 67 | 轴承座HBT25.prt | 202.50K |
| 68 | 连接杆.prt | 422.50K |
| 69 | 链轮SP80B12-N-25.prt | 300.00K |
| 70 | 驱动轴.prt | 178.00K |
此图纸下载需要120金币
立即下载
发布者
一品三维工程师
创作: 270
粉丝: 2
加入时间:2024-05-03

模型信息
图纸格式:prt
文件大小:10.53M
所需金币:120
上传时间:2024-05-25 09:57:22
是否可编辑:可修改,包括参数
版本:UG NX 8
标签
UG技术
3D建模
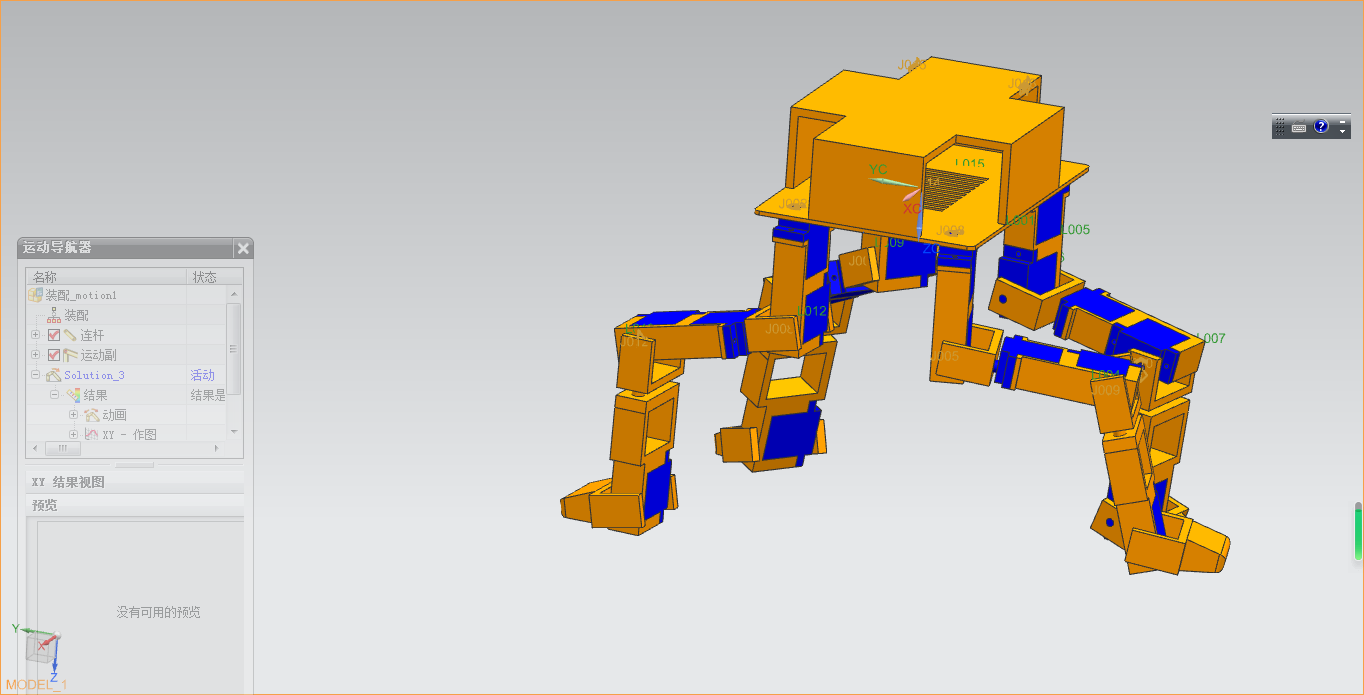
运动仿真
装配图
图纸简介
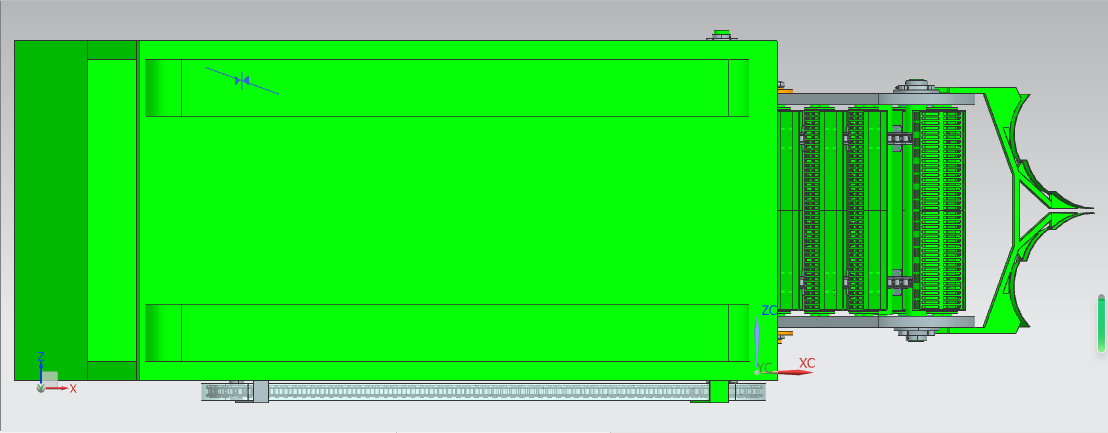
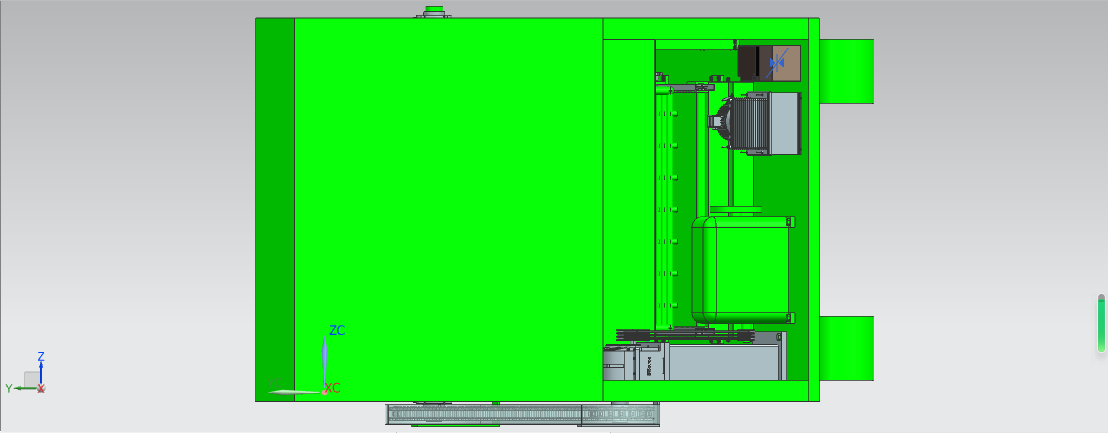
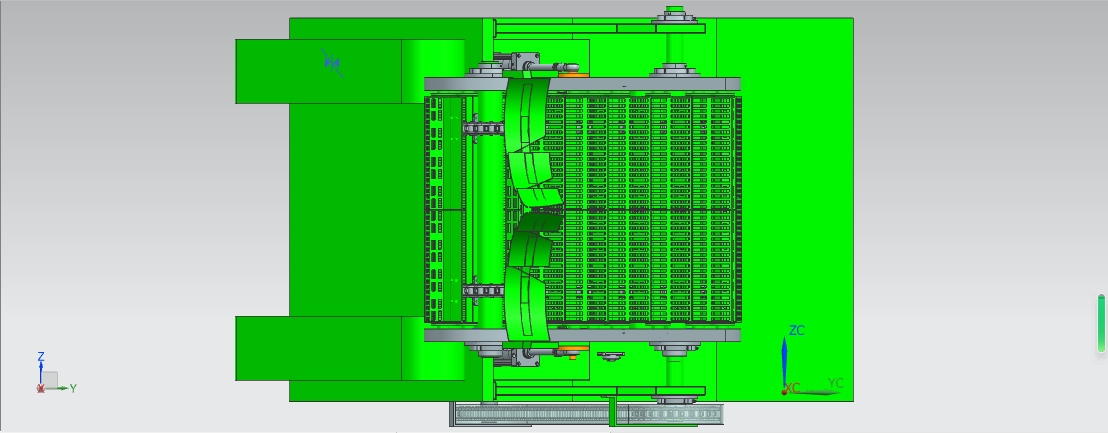
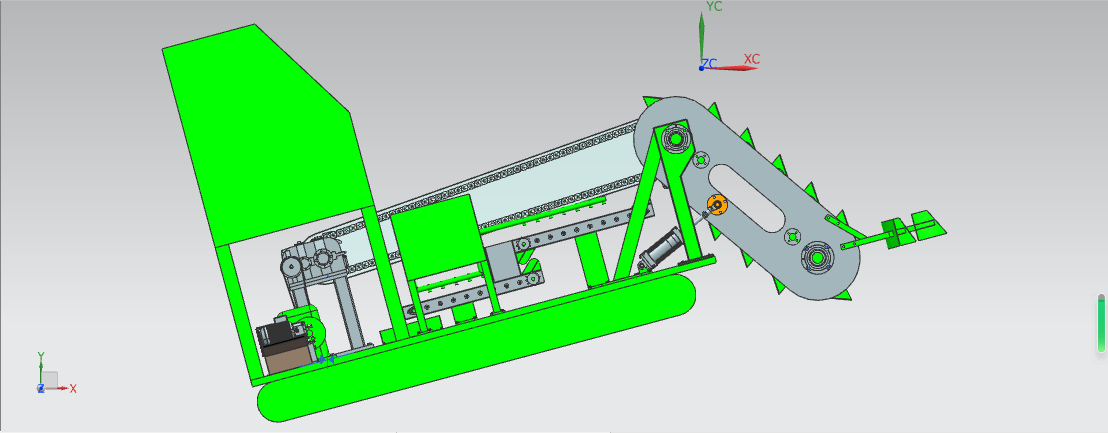
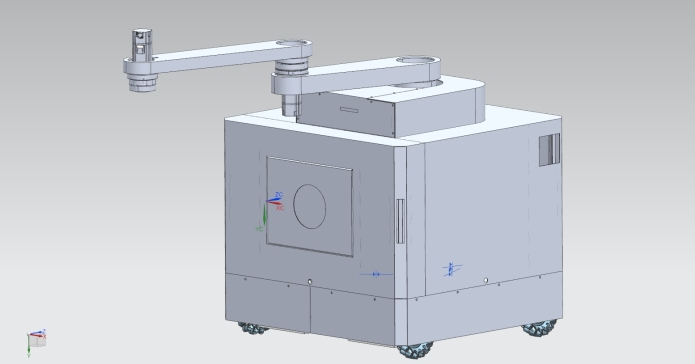
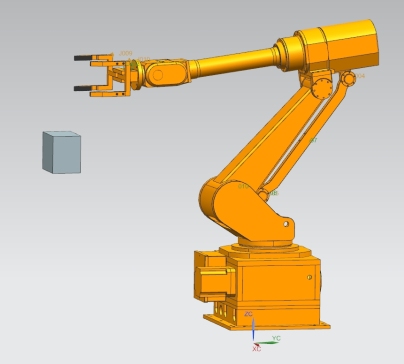
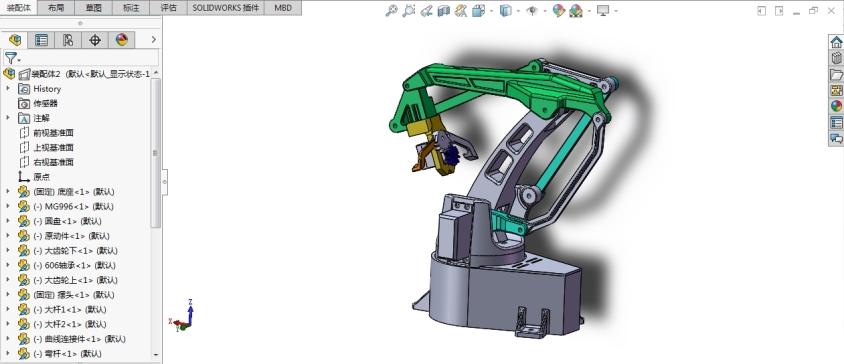
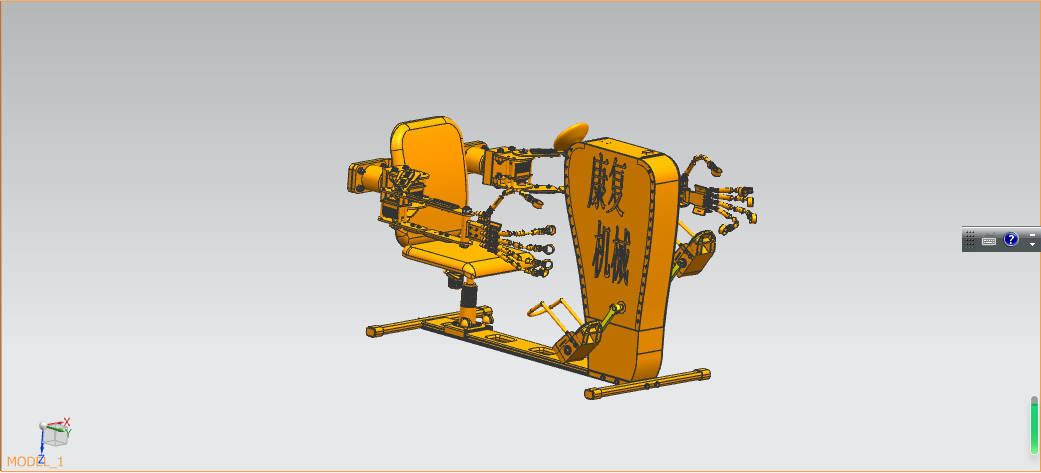
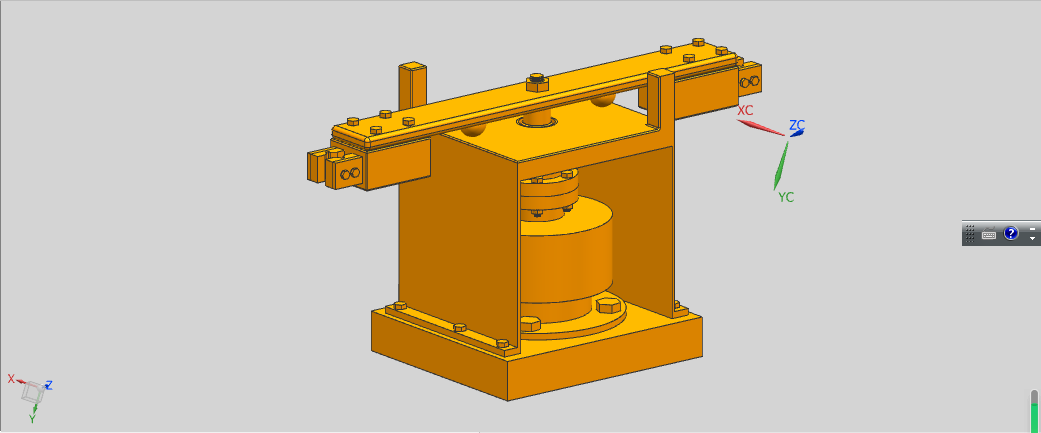
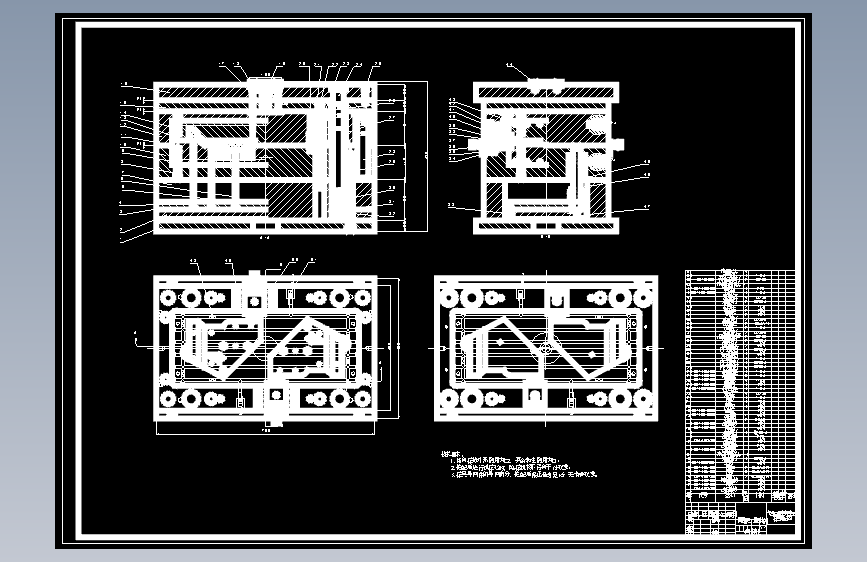
捞机器人是一种特殊类型的水下机器人,设计用于在海洋、湖泊或河流等水体的底部进行挖掘、捞取和采样作业。这些机器人在海底矿产勘探、沉船打捞、环境监测和清理等领域具有重要应用。1.主要参数:工作深度、操控方式、功率和续航能力、载重能力。2.UG技术:3D建模、装配图、运动仿真。3.零部件模型:对于挖捞机器人的每个零件,如机械臂、夹爪、传感器模块、推进器等,都可以使用UG进行详细的设计和优化。
挖捞机器人是一个高度复杂的系统,需要综合运用机械工程、电子工程、计算机科学和海洋工程等多个领域的技术和知识。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。


0.png)
0.png)
0.png)
0.png)
0.png)
0.png)
0.png)

