登录注册
导弹舵面复合操纵机构(ID:2371241)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17520431176085.rar | 20.01M |
| 2 | 8.2球铰链.SLDPRT | 140.97K |
| 3 | EDA40-0-500行程伺服电动缸[EDA40-R01-B04-C50-D010-K05030]-底座.SLDPRT | 5.69M |
| 4 | EDA40-0-500行程伺服电动缸[EDA40-R01-B04-C50-D010-K05030]-活塞杆.SLDPRT | 557.10K |
| 5 | EDA40-0-500行程伺服电动缸[EDA40-R01-B04-C50-D010-K05030]-缸体.SLDPRT | 647.18K |
| 6 | EDA40-0-500行程伺服电动缸[EDA40-R01-B04-C50-D010-K05030]-缸套.SLDPRT | 143.68K |
| 7 | GB╱T117-2000[圆锥销8×60].sldprt | 96.82K |
| 8 | GB╱T119.1-2000[圆柱销不淬硬钢和奥氏体不锈钢8×50].sldprt | 106.51K |
| 9 | GB╱T276-2013[深沟球轴承[60000]6205].sldprt | 1.23M |
| 10 | HSG-63X35-CA基本型圆型工程油缸液压缸[HSG-63X35-100-CAI].sldprt | 14B |
| 11 | 伺服电缸.SLDASM | 2.24M |
| 12 | 复合操纵机构.SLDASM | 7.94M |
| 13 | 零件0导弹筒身.SLDPRT | 174.05K |
| 14 | 零件1舵面.SLDPRT | 139.98K |
| 15 | 零件2带摇臂的半轴.SLDPRT | 164.03K |
| 16 | 零件3.1球形拉杆.SLDPRT | 235.56K |
| 17 | 零件3拉杆.SLDPRT | 165.52K |
| 18 | 零件7.1中心杆.SLDPRT | 102.31K |
| 19 | 零件7中心支架.SLDPRT | 254.36K |
| 20 | 零件8X形摇臂.SLDPRT | 187.65K |
| 21 | 零件9.1.SLDPRT | 89.23K |
| 22 | 零件9万向接头.SLDPRT | 150.12K |
此图纸下载需要200金币
立即下载
发布者
进步青年
创作: 6
粉丝: 0
加入时间:2025-06-09

模型信息
图纸格式:sldprt,sldasm
文件大小:20.49M
所需金币:200
上传时间:2025-07-09 14:38:41
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2019
标签
图纸简介
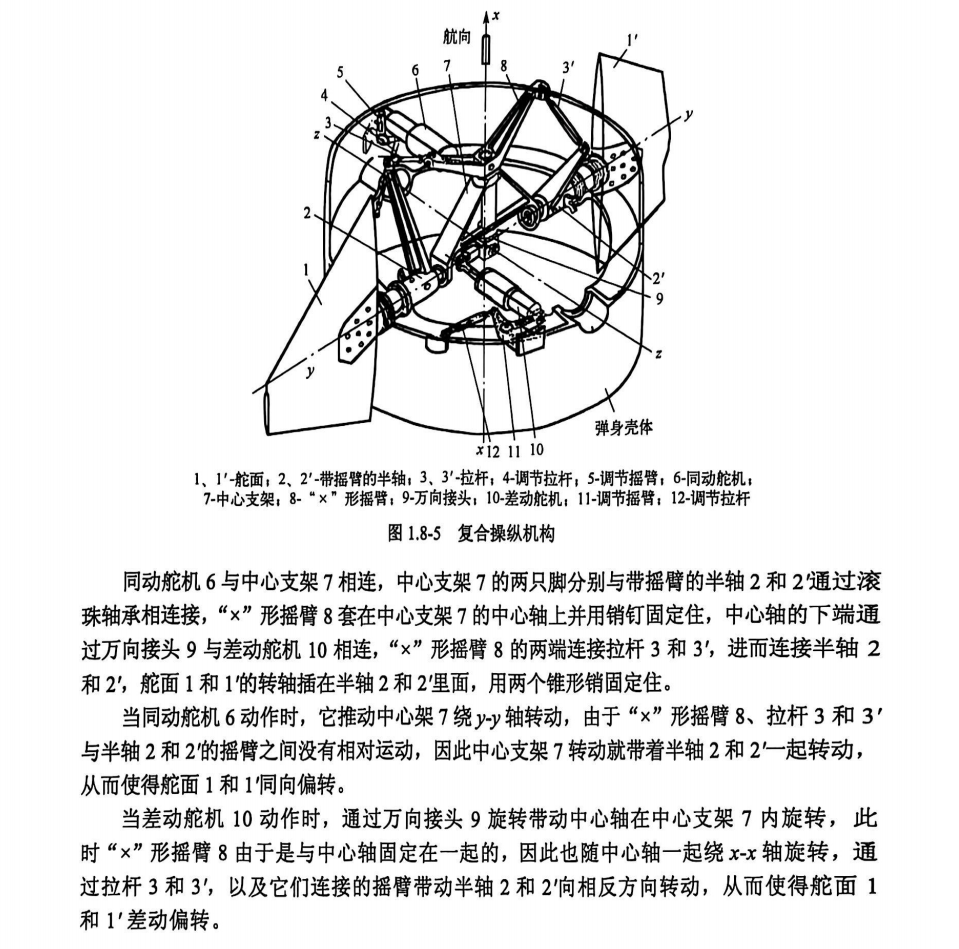
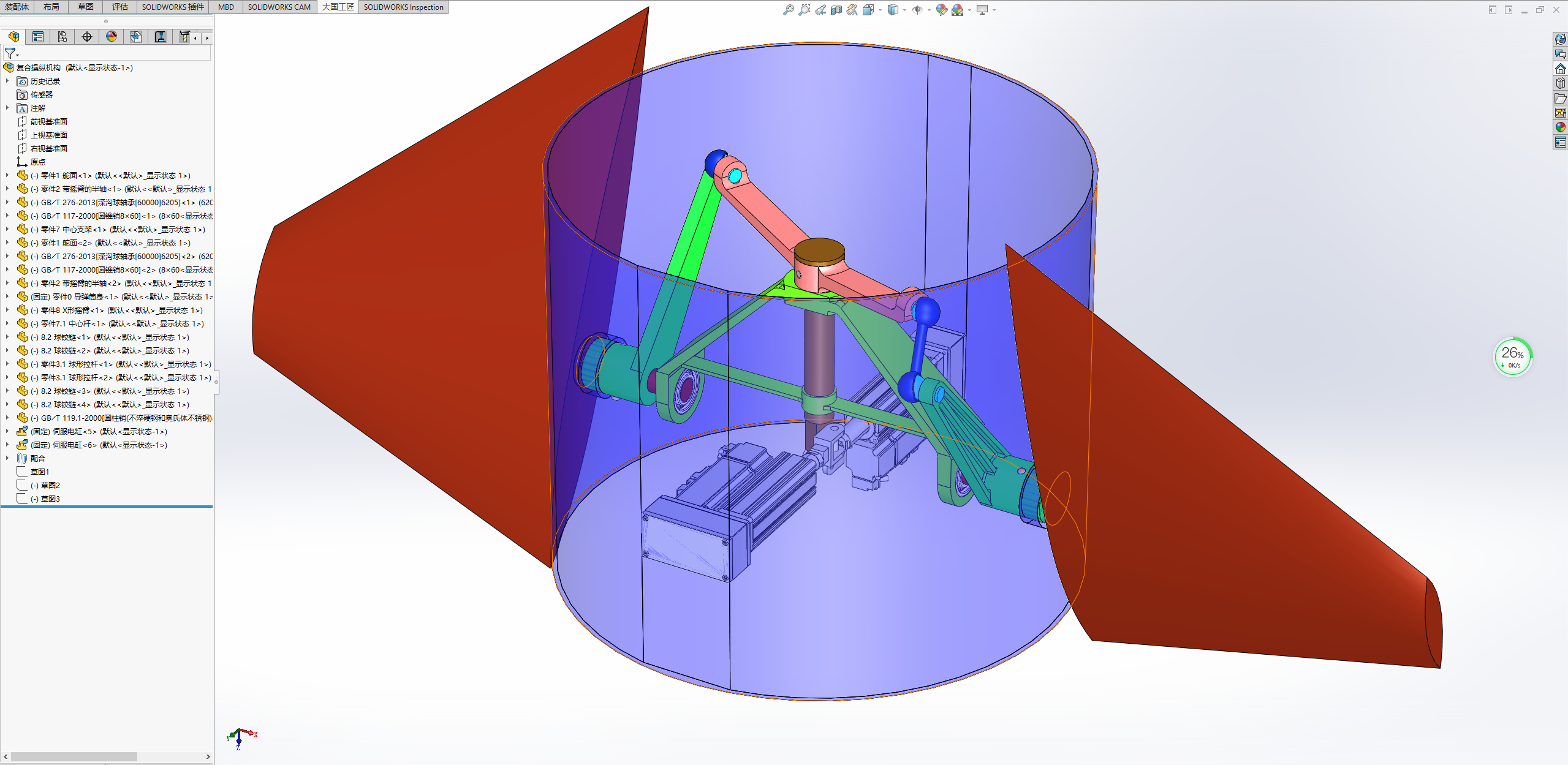
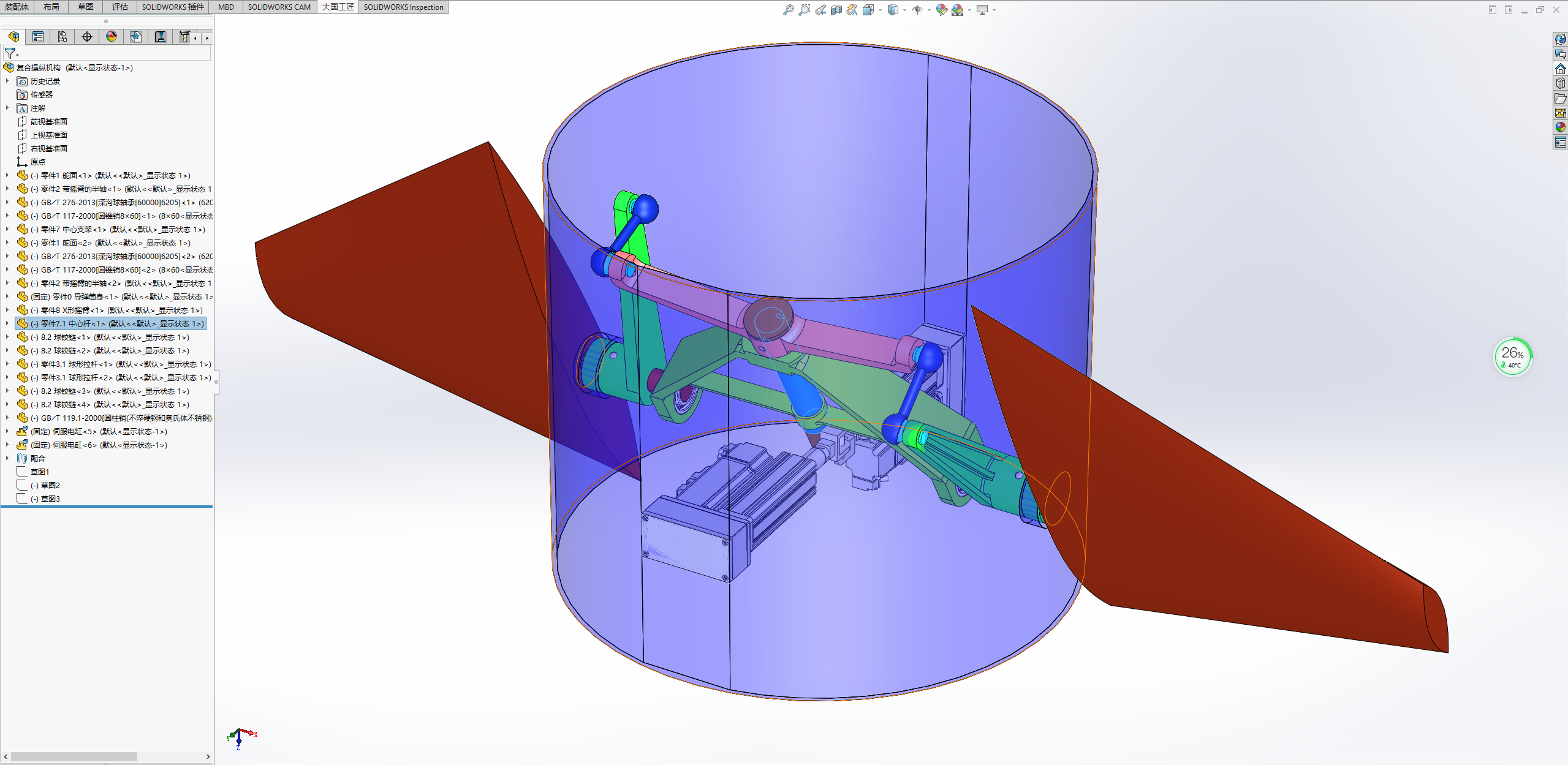
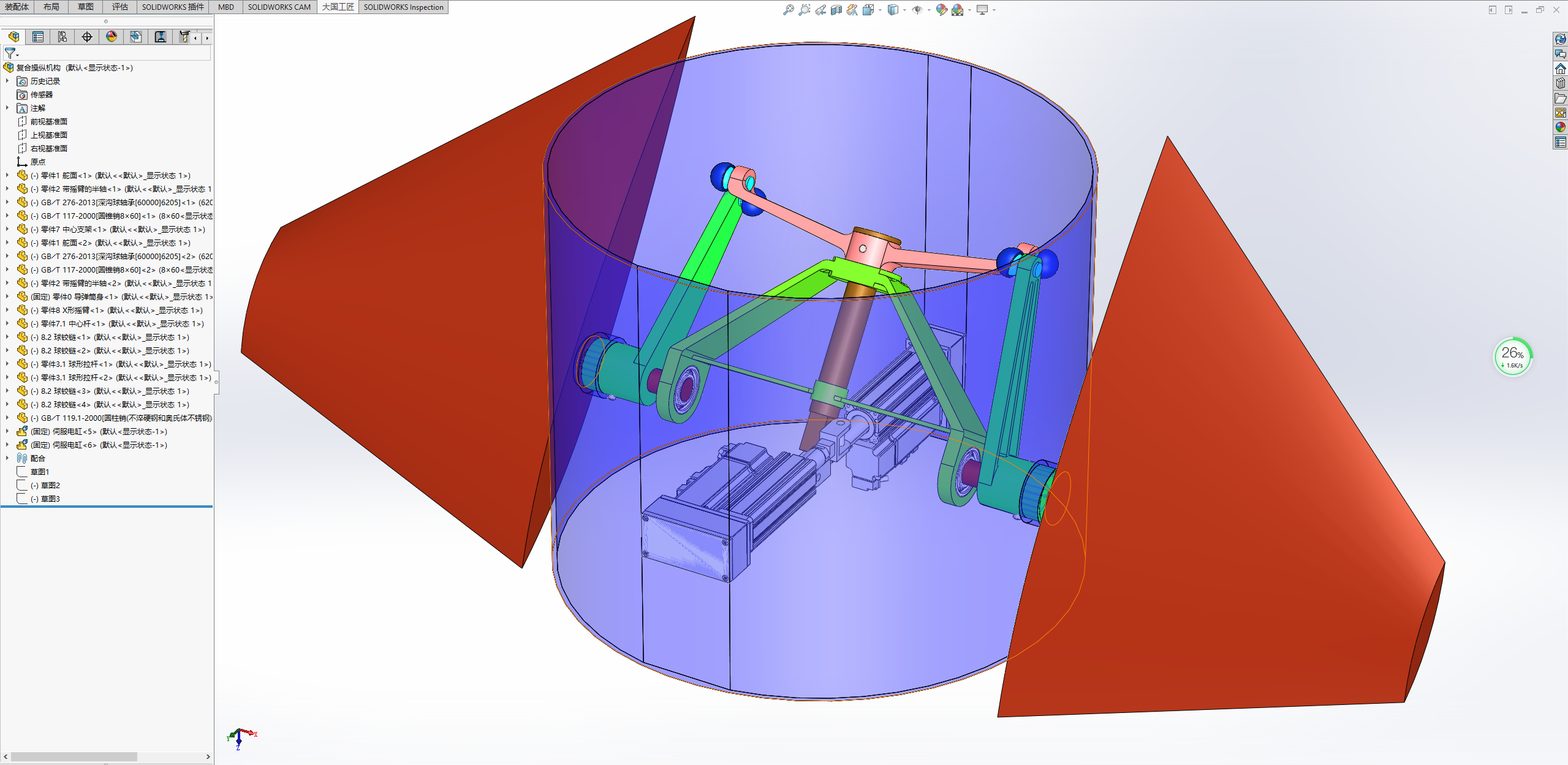
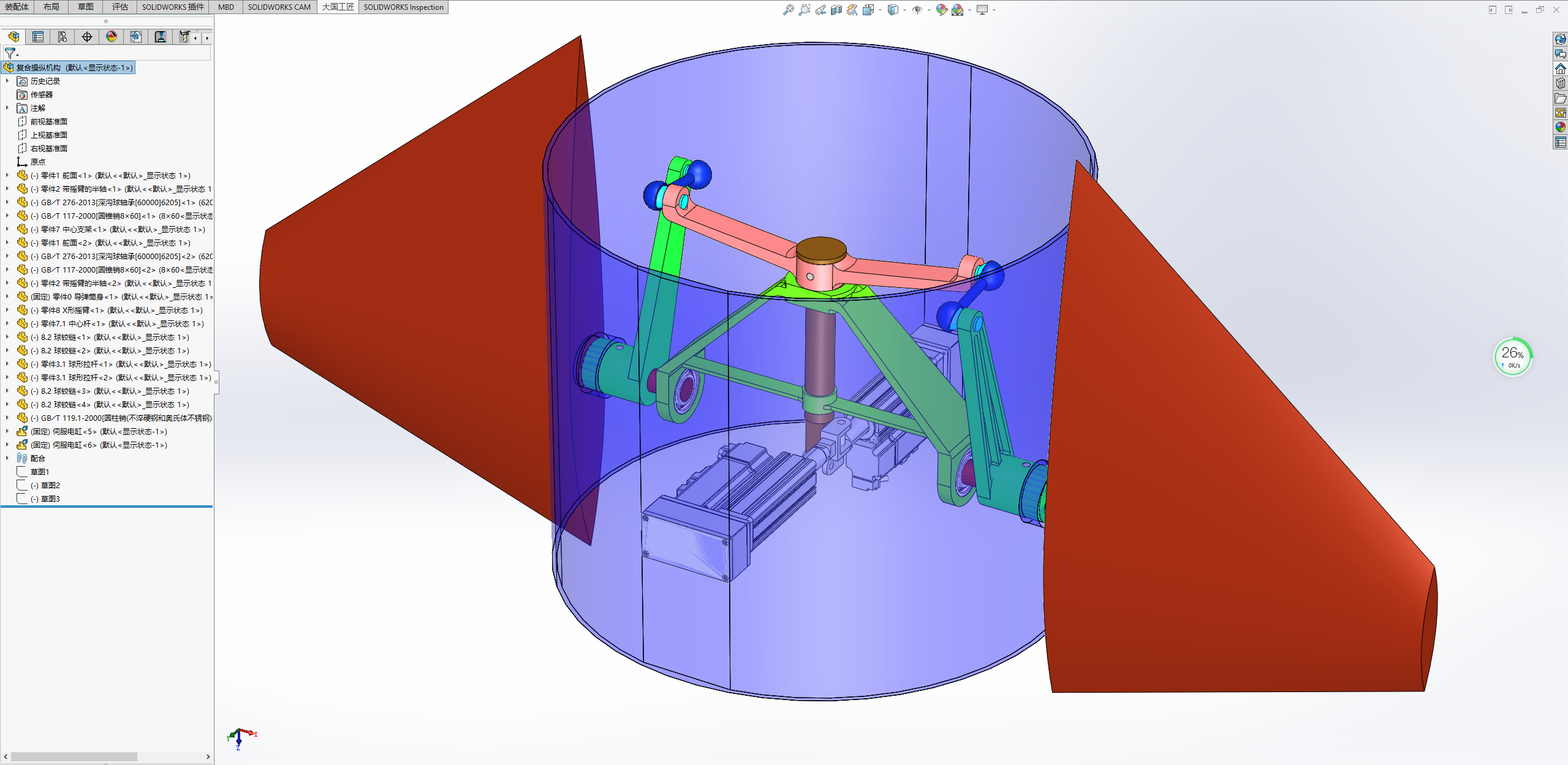
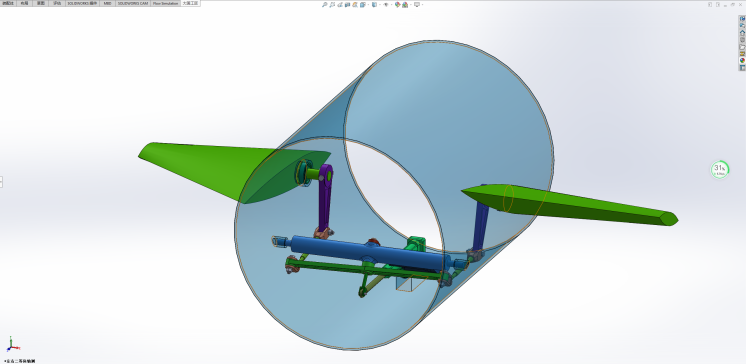
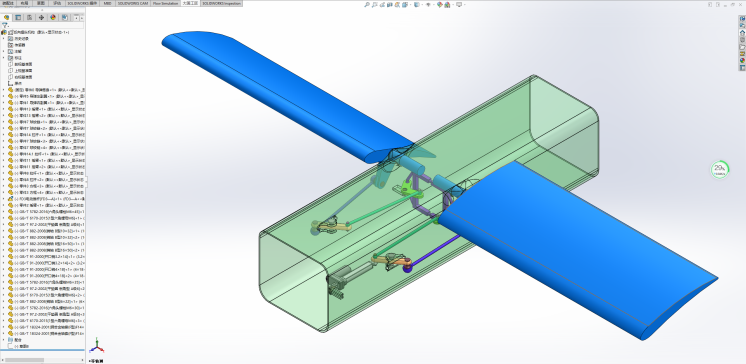
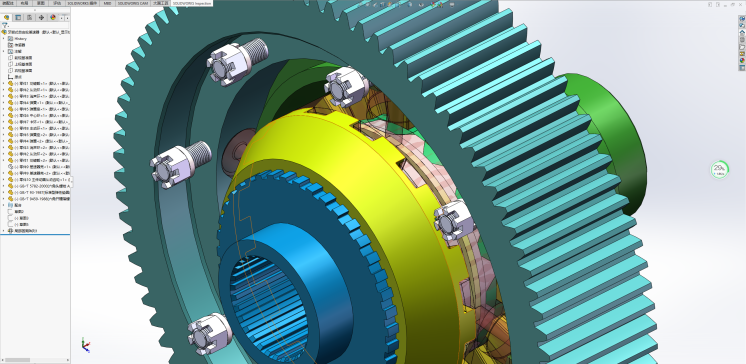
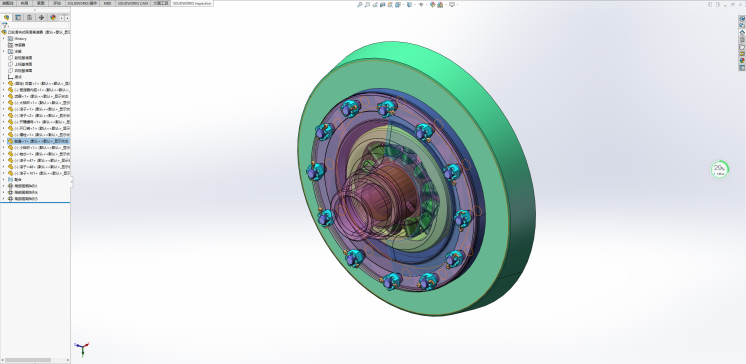
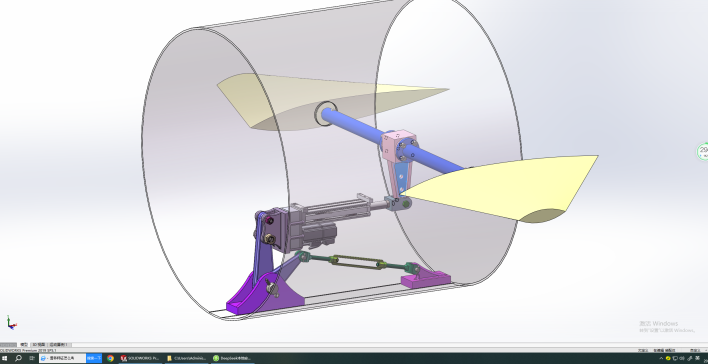
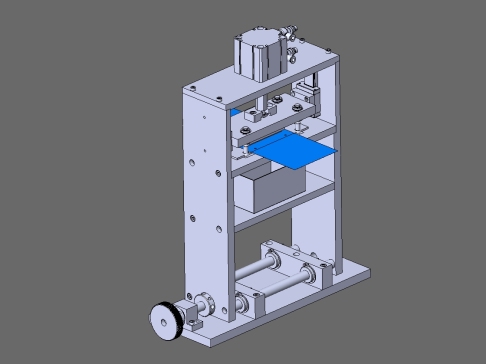
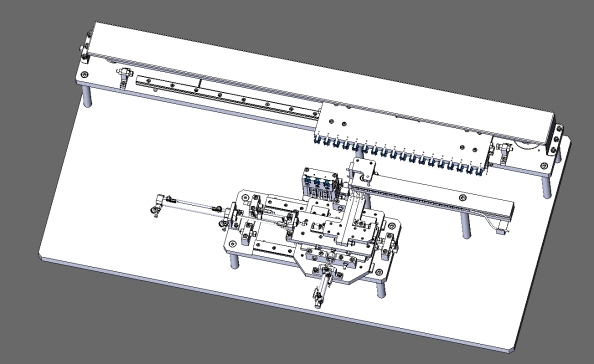
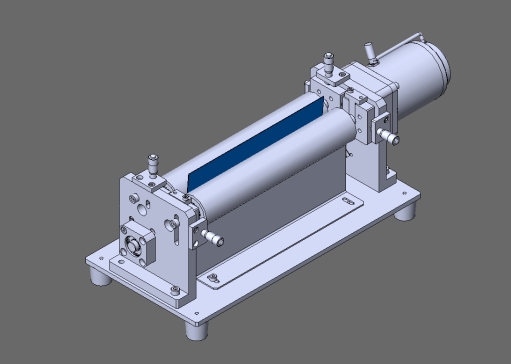
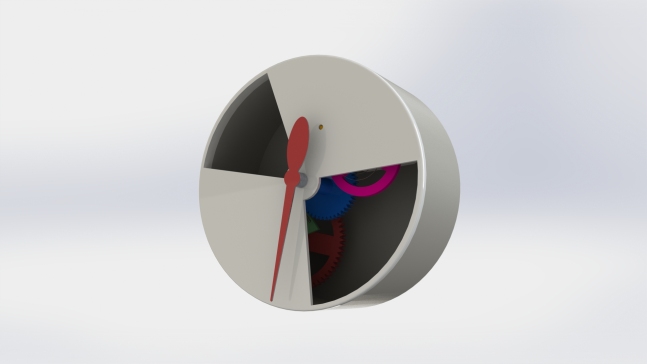
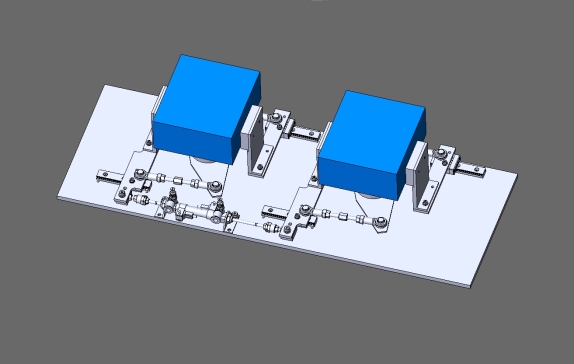
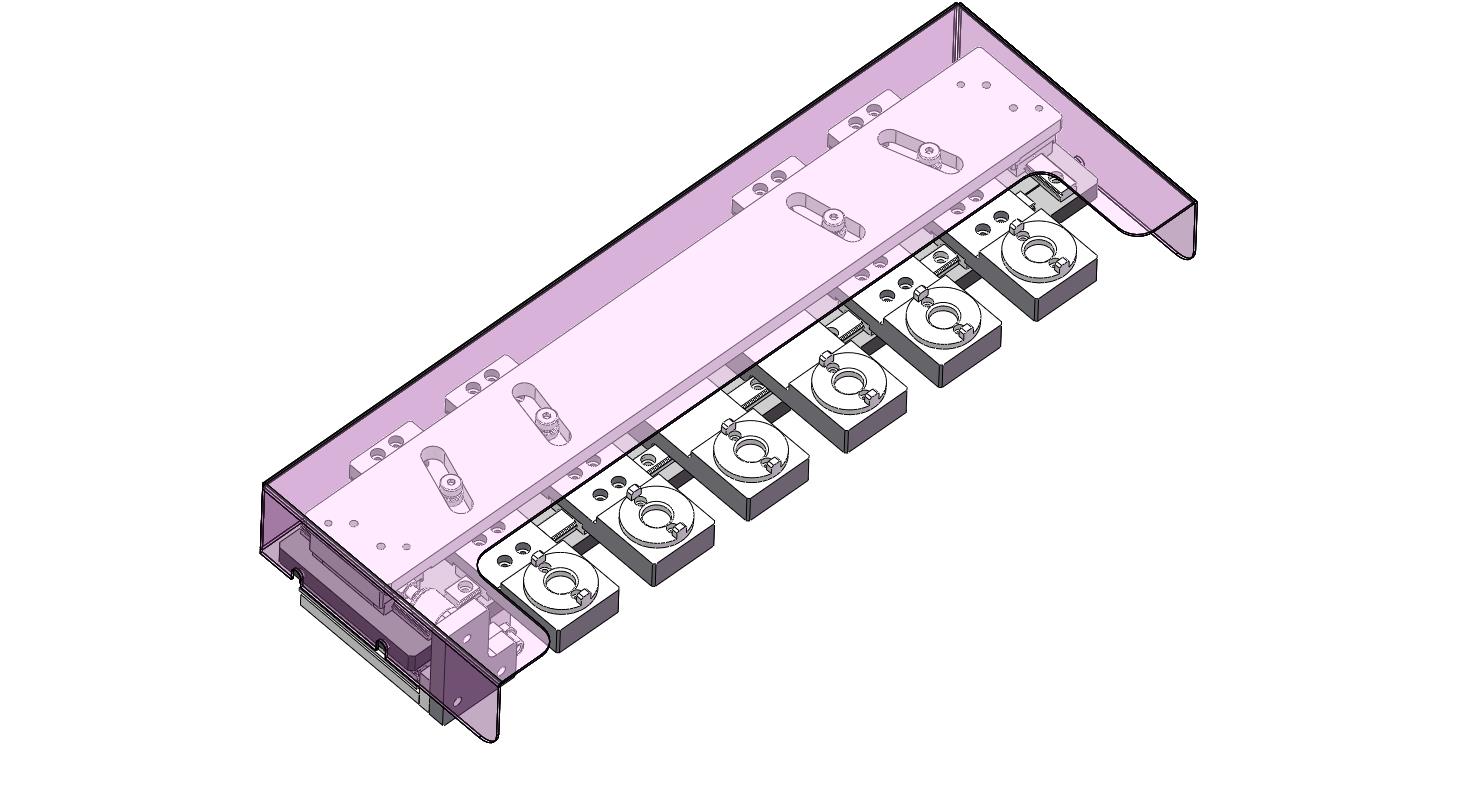
同动舵机与中心支架相连,中心支架的两只脚分别与带摇臂的半轴和通过滚珠轴承相连接,“x”形摇臂套在中心支架的中心轴上并用销钉固定住,中心轴的下端通过万向接头与差动舵机 相连,“x”形摇臂8的两端连接拉杆,进而连接半轴 ,舵面的转轴插在半轴里面,用两个锥形销固定住。 当同动舵机动作时,它推动中心架绕yy轴转动,由于“x”形摇臂、拉杆与半轴的摇臂之间没有相对运动,因此中心支架转动就带着半轴一起转动,从而使得舵面同向偏转。 当差动舵机动作时,通过万向接头旋转带动中心轴在中心支架内旋转,此时“x”形摇臂由于是与中心轴固定在一起的,因此也随中心轴一起绕x-x轴旋转,通过拉杆,以及它们连接的摇臂带动半轴向相
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0_0_364.png)
0.png)
0.png)
0.png)
0.png)
0_0_364.png)
0.jpg)
0.png)
0.png)
0.jpg)
0.png)