
登录注册
导弹舵副翼操纵机构(ID:2408577)
0.png)
1.png)
2.png)
3.png)
4.png)
| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 17531676467031.rar | 12.68M |
| 2 | GB╱T1096-2003[普通平键A型键3×3×6].sldprt | 130.17K |
| 3 | GB╱T1096-2003[普通平键A型键5×5×10].sldprt | 129.28K |
| 4 | GB╱T1096-2003[普通平键A型键6×6×20].sldprt | 120.75K |
| 5 | GB╱T1096-2003[普通平键A型键6×6×28].sldprt | 117.73K |
| 6 | GB╱T276-2013[深沟球轴承[60000]6205].sldprt | 1.23M |
| 7 | GB╱T5782-2016[六角头螺栓M8×40].sldprt | 249.83K |
| 8 | GB╱T5782-2016[六角头螺栓M8×50].sldprt | 238.90K |
| 9 | GB╱T5782-2016[六角头螺栓M8×65].sldprt | 233.28K |
| 10 | GB╱T6170-2000[1型六角螺母A级和B级M8].sldprt | 136.22K |
| 11 | GB╱T882-2008[销轴B型6×16].sldprt | 120.16K |
| 12 | GB╱T882-2008[销轴B型6×18].sldprt | 126.03K |
| 13 | GB╱T882-2008[销轴B型6×20].sldprt | 117.79K |
| 14 | GB╱T91-2000[开口销1.6×10].sldprt | 125.66K |
| 15 | GB╱T91-2000[开口销2×10].sldprt | 129.50K |
| 16 | GB╱T93-1987[标准型弹性垫圈装配8].sldprt | 106.33K |
| 17 | 舵副翼操纵机构.SLDASM | 2.28M |
| 18 | 零件0导弹筒身.SLDPRT | 295.64K |
| 19 | 零件11调节机构.SLDPRT | 97.08K |
| 20 | 零件1舵面.SLDPRT | 141.75K |
| 21 | 零件2转销.SLDPRT | 116.78K |
| 22 | 零件3传动轴.SLDPRT | 99.27K |
| 23 | 零件4操纵摇臂.SLDPRT | 148.27K |
| 24 | 零件5.1球铰链.SLDPRT | 229.46K |
| 25 | 零件5拉杆.SLDPRT | 132.08K |
| 26 | 零件7横轴.SLDPRT | 212.76K |
| 27 | 零件8副翼摇臂.SLDPRT | 204.30K |
| 28 | 零件9双摇臂.SLDPRT | 169.45K |
| 29 | FD3电动推杆.SLDPRT | 379.95K |
| 30 | FD3电动推杆[FD3—A]-150.sldasm | 180.05K |
| 31 | FD3电动推杆[FD3—A]-150_FD3电动推杆.sldprt | 470.51K |
| 32 | FD3电动推杆[FD3—A]-150_FD3电动推杆杆.sldprt | 382.73K |
| 33 | FD3电动推杆杆.SLDPRT | 325.55K |
| 34 | 镜向FD3电动推杆.SLDPRT | 165.50K |
| 35 | FD3电动推杆.SLDPRT | 378.31K |
| 36 | FD3电动推杆[FD3—A]-50.sldasm | 716.98K |
| 37 | FD3电动推杆[FD3—A]-50_FD3电动推杆.sldprt | 445.95K |
| 38 | FD3电动推杆[FD3—A]-50_FD3电动推杆杆.sldprt | 374.24K |
| 39 | FD3电动推杆杆.SLDPRT | 341.35K |
| 40 | POS8.stp | 152.14K |
| 41 | 镜向FD3电动推杆.SLDPRT | 165.50K |
| 42 | 鱼眼接头.SLDASM | 620.87K |
| 43 | 鱼眼接头.SLDPRT | 737.36K |
| 44 | 鱼眼滚子.SLDPRT | 230.14K |
此图纸下载需要200金币
立即下载
发布者
进步青年
创作: 6
粉丝: 0
加入时间:2025-06-09

模型信息
图纸格式:sldprt,sldasm,stp
文件大小:12.98M
所需金币:200
上传时间:2025-07-22 15:00:48
是否可编辑:可修改,包括参数
版本:SOLIDWORKS 2019
标签
图纸简介
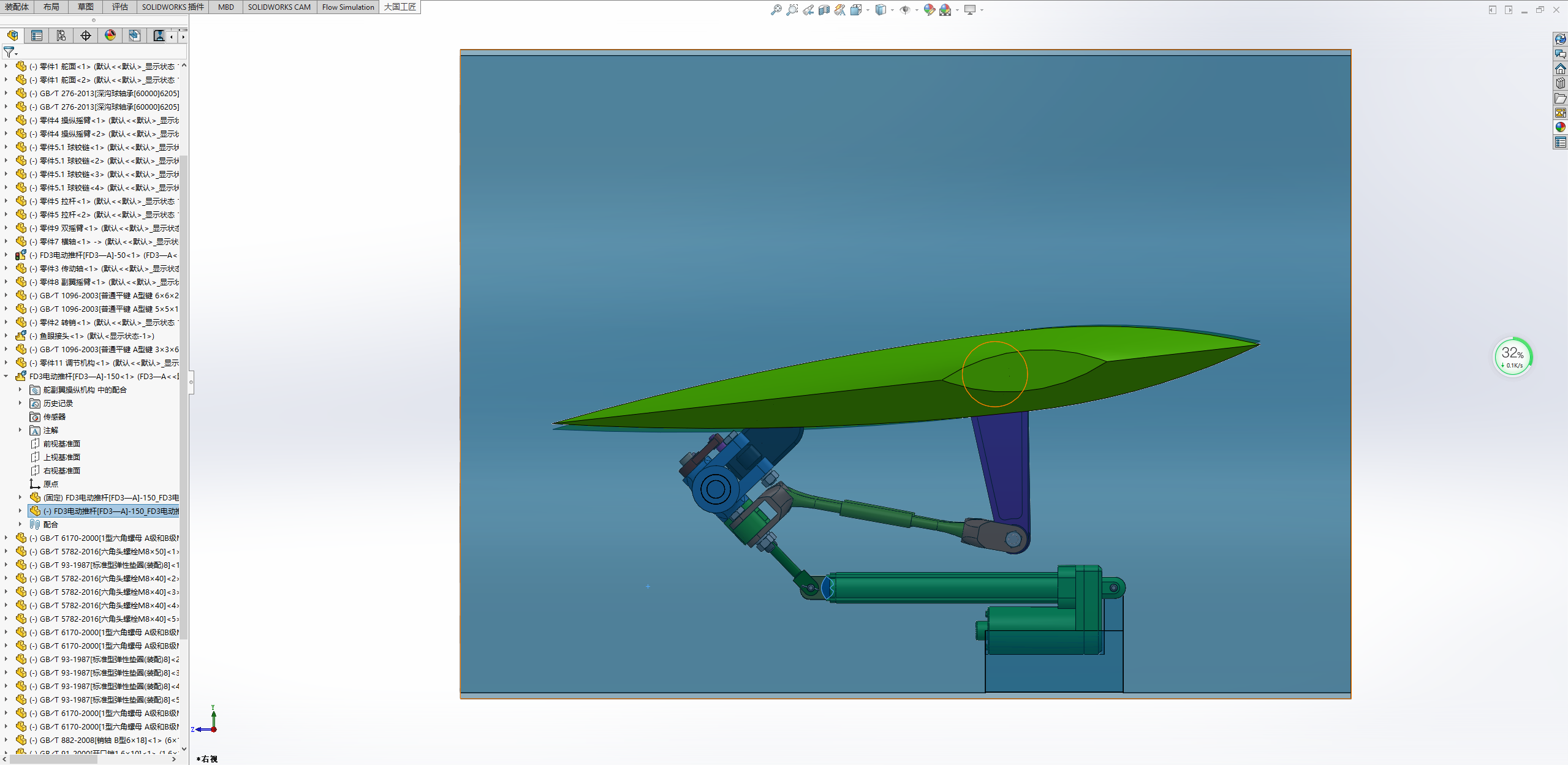
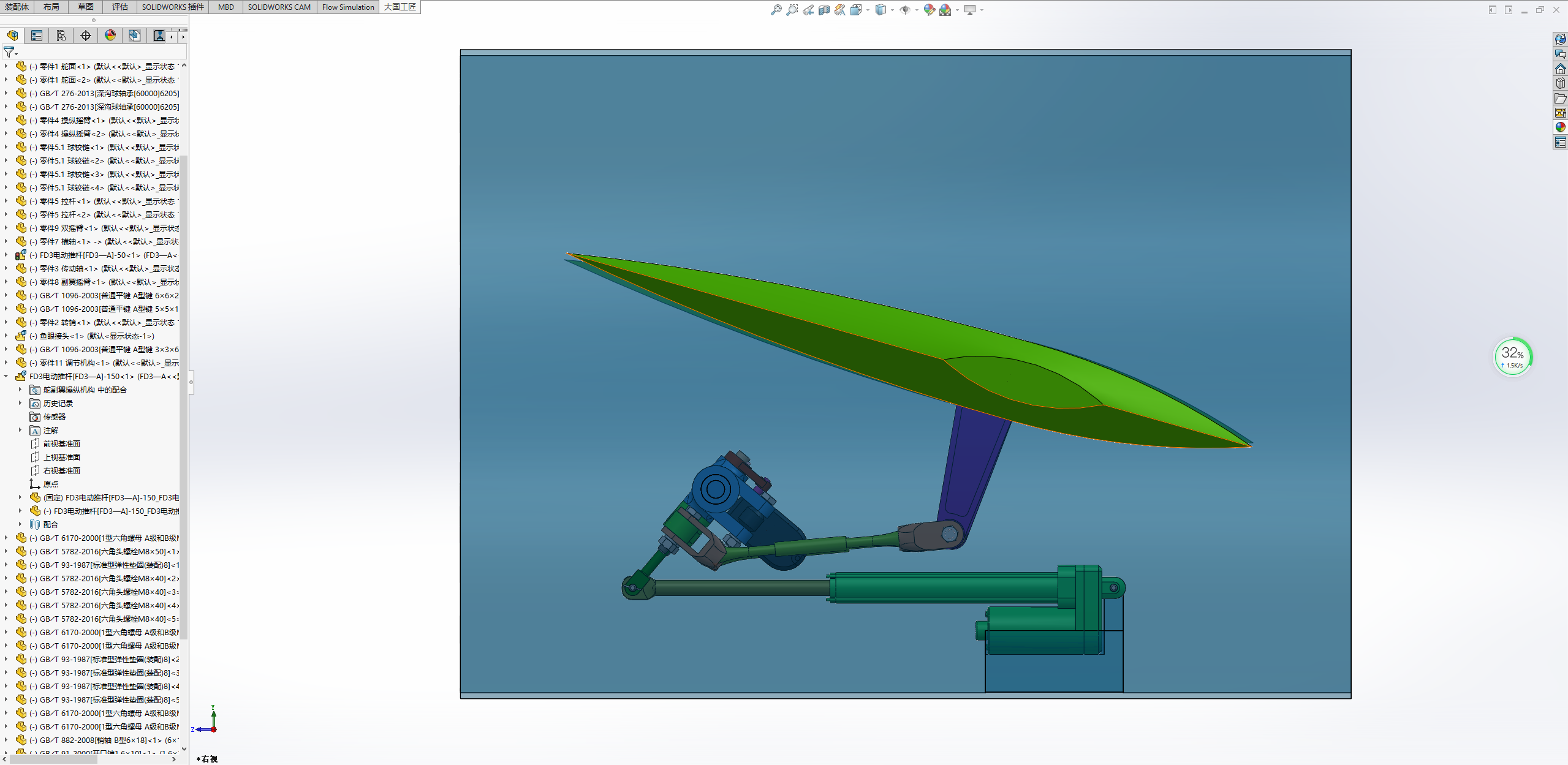
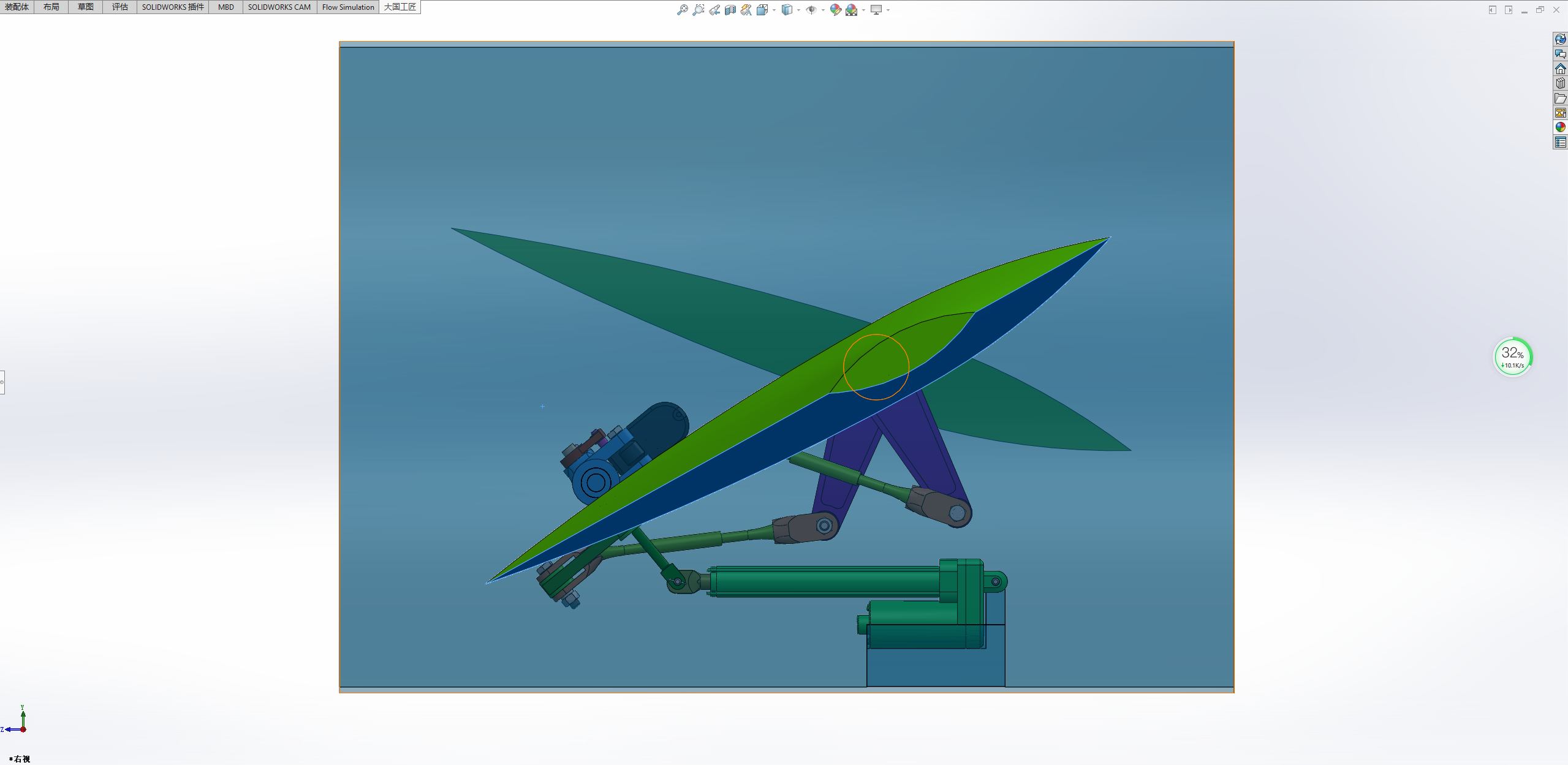
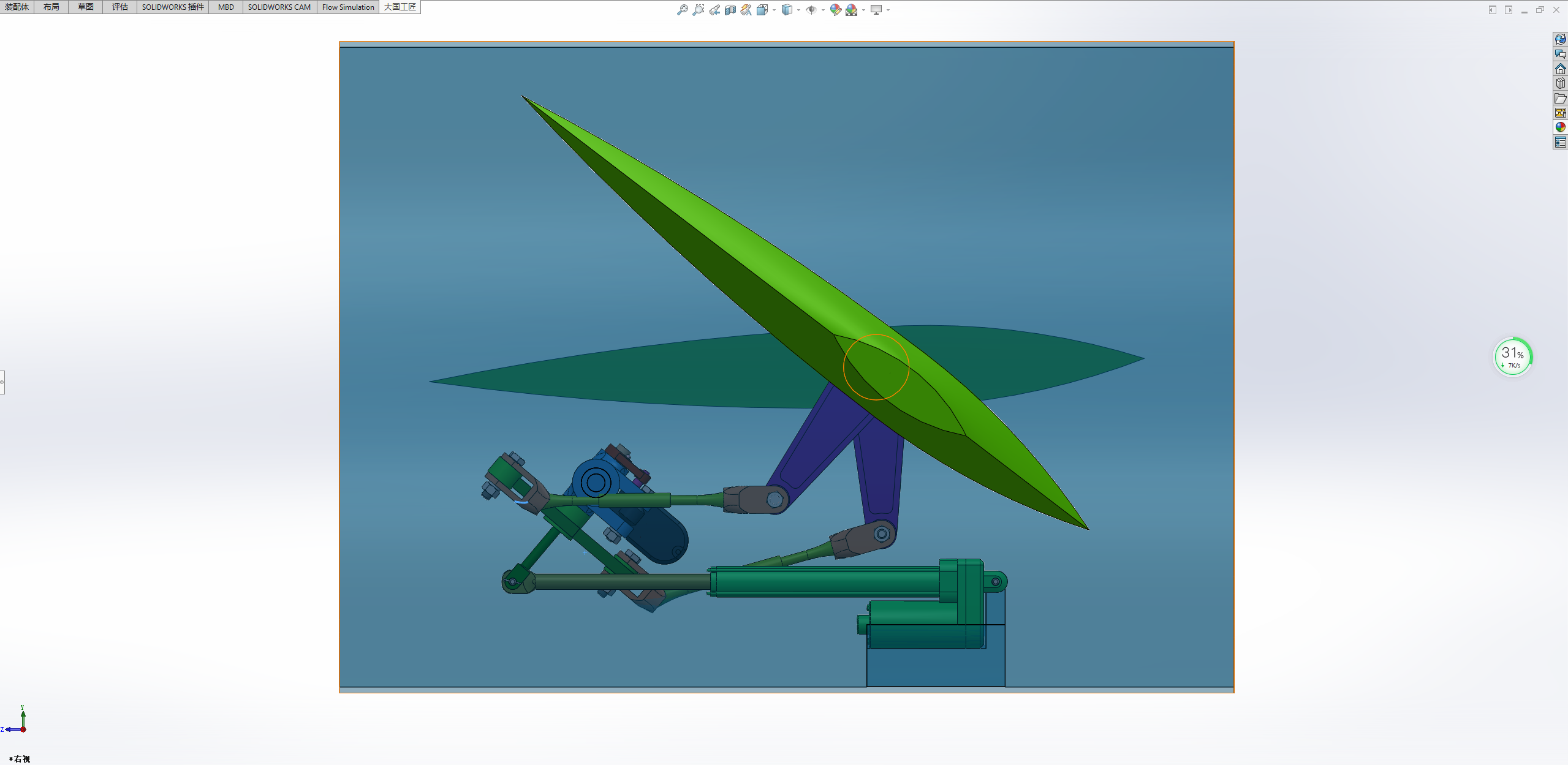
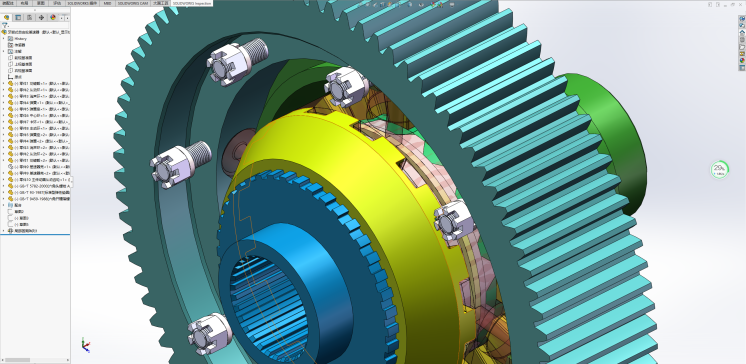
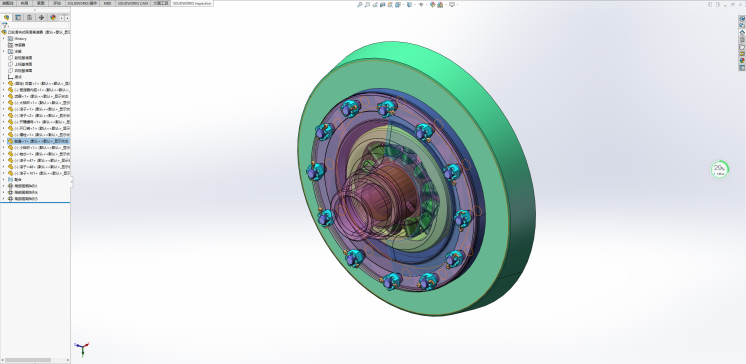
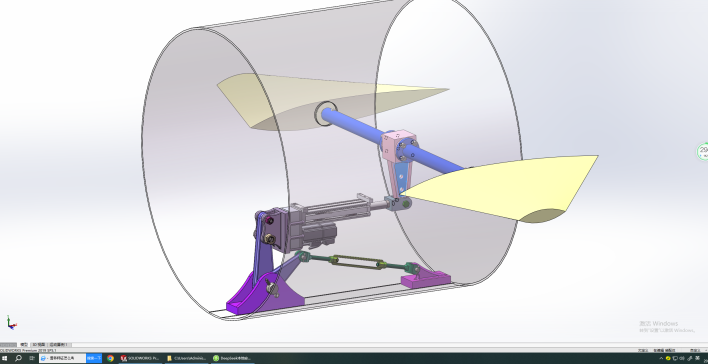
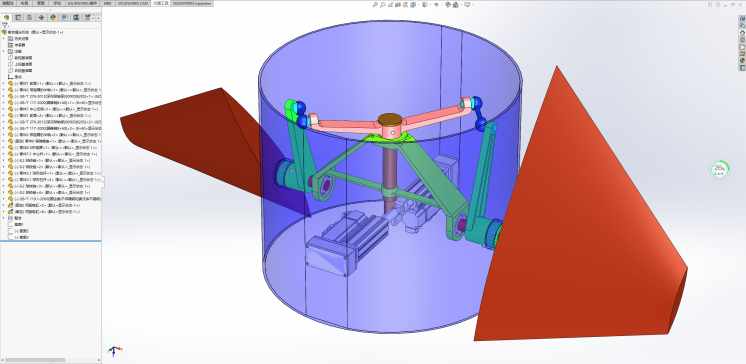
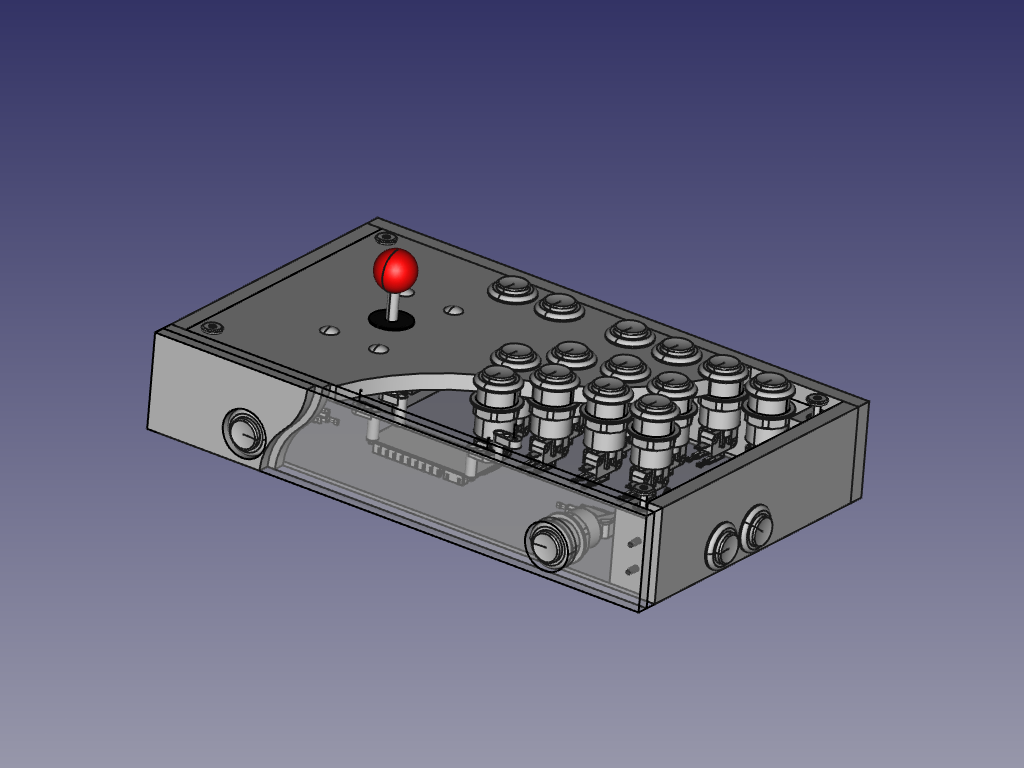
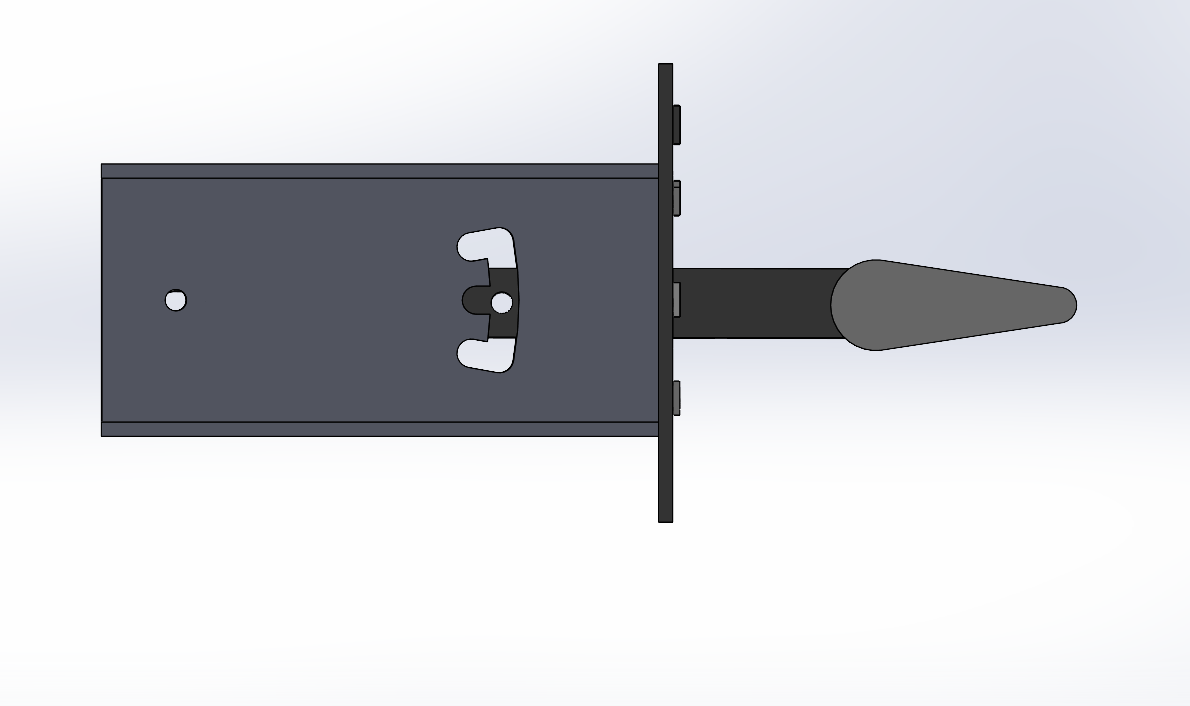
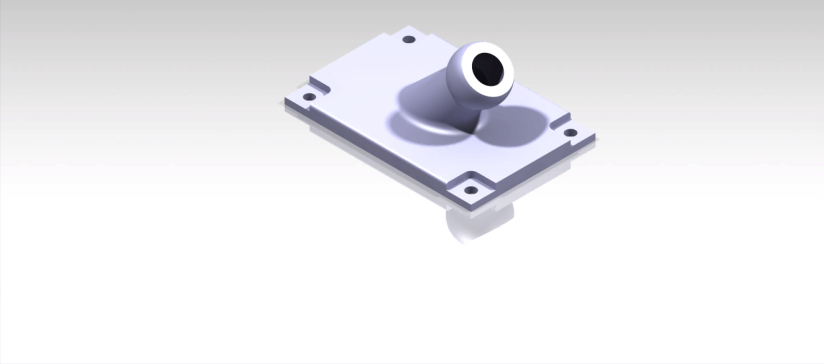
舵副翼操纵机构是一种复合操纵机构,它既可使操纵面作同向偏转起舵的作用,又可使其反偏转起副翼的作用。如图是舵副翼操纵机构的示意图。同动作用是操纵同动舵机推动横轴绕轴线转动来实现的,差动作用是操纵副翼舵机推动双摇臂绕平行于Z的轴转动来完成的。同动作用过程如下:同动舵机推动横轴绕轴线转动,通过双摇臂推动左、右拉杆的拉伸,从而带动左右操纵摇臂的同向转动,产生左、右舵的绕左、右半轴同向偏转。差动作用过程如下:副翼舵机的拉伸通过副翼摇臂带动双摇臂绕平行于 Z"的轴转动,左右拉杆产生反方向的拉伸,从而带动左右操纵摇臂的反向转动,产生1号舵和3号舵的反向偏转。
版权说明
用户在本站上传的作品如侵犯到您的权益,请与本站管理员联系删除。用户在本站下载的原创作品,只拥有作品的使用权,著作权归原作者所有,未经合法授权,用户不得以任何形式发布、传播、复制、转售该作品。
0.jpg)
0.jpg)

0.png)
0.png)


0.jpg)
0.png)
0.png)
0.png)
0.jpg)

